视觉SLAM进阶:手写VIO与IMU融合实战
如何掌握视觉SLAM进阶?手写VIO与IMU融合实战课程解析

1. 课程核心价值
视觉SLAM进阶课程专为已具备SLAM基础的学习者设计,重点突破IMU传感器数据处理与多传感器融合技术难点。课程通过理论推导与代码实践结合的方式,系统讲解从IMU预积分到VINS系统构建的全流程,帮助学员掌握手写VIO(视觉惯性里程计)的核心算法。2. 课程内容架构
课程分为7大模块,层层递进:
- 传感器基础:深入解析IMU工作原理与误差模型
- 优化算法:基于预积分的IMU与视觉数据融合方法
- 滑动窗口理论:详解VIO系统的可观性与一致性
- 代码实践:逐行实现求解器与滑动窗口算法
- 工程落地:完整构建VINS系统并优化视觉前端3. 实战特色亮点
课程以"理论+代码"双轨教学为特色,所有算法均提供可运行的源码:
- 手写实现IMU预积分的雅可比矩阵推导
- 完成滑动窗口优化器的增量式求解
- 实战演练特征点跟踪与关键帧管理策略
- 带注释的课件代码覆盖Eigen、Ceres等主流库的应用4. 适合人群分析
本课程适合:
- 已学习过SLAM基础理论(如ORB-SLAM)的开发者
- 需要提升多传感器融合能力的机器人算法工程师
- 希望理解VIO系统底层原理的研究人员
- 追求从公式推导到工程实现完整闭环的学习者5. 课程学习建议
建议按"视频学习→推导验证→代码调试"三步骤进行:
1. 先通过理论视频理解IMU预积分与Bundle Adjustment的关系
2. 结合课件推导滑动窗口的边缘化过程
3. 使用提供的代码框架逐步实现重力对齐等关键模块
注意:需提前熟悉C++11、李群李代数及非线性优化基础知识。
通过本课程,学习者不仅能掌握VIO系统的实现细节,更能培养解决复杂SLAM工程问题的思维能力。从IMU标定到实时位姿估计,构建完整的自动驾驶/机器人定位技术栈。
资源下载通道
夸克网盘分享
文件大小:7.73 GB
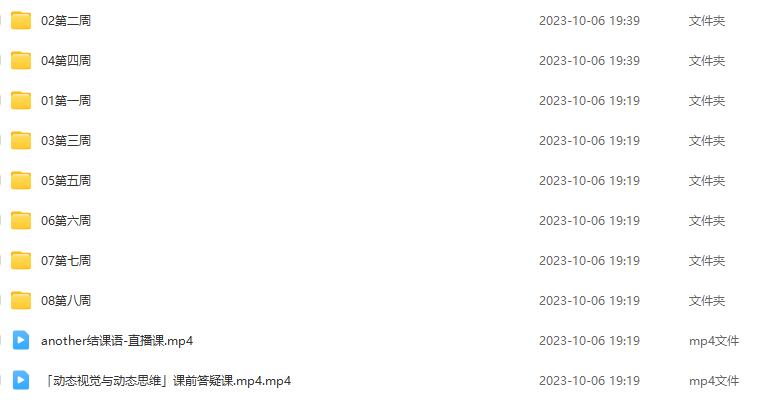
资源目录列表:
├─【深蓝学院】视觉SLAM进阶:从零开始手写VIO-带源码课件│ ├─第1节概述与课程介绍
│ │ ├─任务1-2:【视频】概述与课程介绍(上).flv
│ │ ├─任务1-3:【视频】概述与课程介绍(下).flv
│ ├─第2节IMU传感器
│ │ ├─任务2-2:【视频】IMU传感器(上).flv
│ │ ├─任务2-3:【视频】IMU传感器(下).flv
│ ├─第3节基于优化的IMU预积分与视觉信息融合
│ │ ├─任务3-2:【视频】基于优化的IMU预积分与视觉信息融合(上).flv
│ │ ├─任务3-3:【视频】基于优化的IMU预积分与视觉信息融合(下).flv
│ ├─第4节滑动窗口算法理论:VIO融合及其可观性与一致性
│ │ ├─任务5-2:【视频】滑动窗口算法理论(上).flv
│ │ ├─任务5-3:【视频】滑动窗口算法理论(下).flv
│ ├─第5节滑动窗口算法实践:逐行手写求解器
│ │ ├─任务6-2:【视频】Solver流程回顾及代码讲解.flv
│ │ ├─任务6-3:【视频】滑动窗口算法回顾及代码实践.flv
│ ├─第6节视觉前端
│ │ ├─任务7-2:【视频】视觉前端(上)(2).flv
│ │ ├─任务7-3:【视频】视觉前端(下).flv
│ ├─第7节VINS系统构建
│ │ ├─任务8-2:【视频】VINS系统构建(上).flv
│ │ ├─任务8-3:【视频】VINS系统构建(下).flv

























相关资源